

 联系我们
联系我们
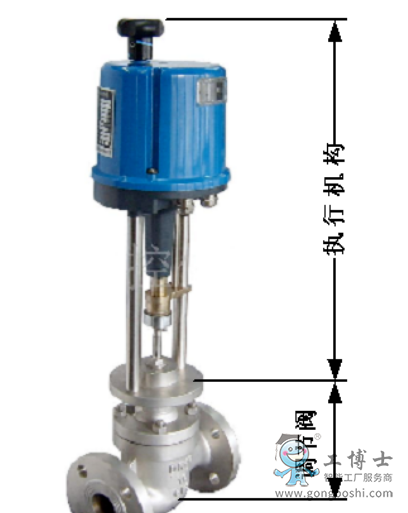
一、电动调节阀的基本结构
电动调节阀上部是执行机构,接受调节器输出的0~10mADC或4~20mADC信号,并将其转换成相应的直线位移,推动下部的调节阀动作,直接调节流体的流量。
各类电动调节阀的执行机构基本相同,但调节阀(调节机构)的结构因使用条件的不同类型很多,***常用的是直通单阀座和直通双阀座两种。
二、电动执行机构的基本结构
其电动执行器主要是由相互隔离的电气部分和传动部分组成,电机作为连接两个隔离部分的中间部件。电机按控制要求输出转矩,通过多级正齿轮传递到梯形丝杆上,梯形丝杆通过螺纹变换转矩为推力。
因此梯形螺杆通过自锁的输出轴将直线行程传递到阀杆。执行机构输出轴带有一个防止传动的止转环,输出轴的径向锁定装置也可以做动位置指示器。
输出轴止动环上连有一个旗杆,旗杆随输出轴同步运行,通过与旗杆连接的齿条板将输出轴位移转换成电信号,提供给智能控制板作为比较信号和阀位反馈输出。同时执行机构的行程也可由齿条板上的两个主限位开关开限制,并由两机械限位保护。

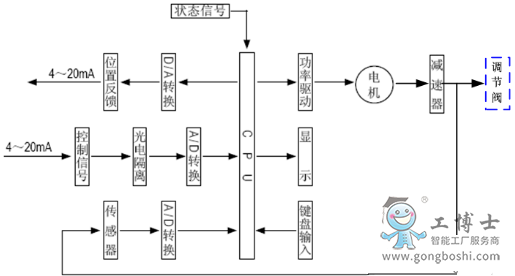
三、执行机构工作原理
电动执行机构是以电动机为驱动源、以直流电流为控制及反馈信号,原理方块图如下图所示。

当控制器的输入端有一个信号输入时,此信号与位置信号进行比较,当两个信号的偏差值大于规定的死区时,控制器产生功率输出,驱动伺服电动机转动使减速器的输出轴朝减小这一偏差的方向转动,直到偏差小于死区为止。此时输出轴就稳定在与输入信号相对应的位置上。
四、控制器结构
控制器由主控电路板、传感器、带LED 操作按键、分相电容、接线端子等组成。智能伺服放大器以专用单片微处理器为基础,通过输入回路把模拟信号、阀位电阻信号转换成数字信号,微处理器根据采样结果通过人工智能控制软件后,显示结果及输出控制信号。
五、调节阀的基本结构
调节阀与工艺管道中被调介质直接接触,阀芯在阀体内运动,改变阀芯与阀座之间的流通面积,即改变阀门的阻力系数就可以对工艺参数进行调节。
下图给出直通单阀座和直通双阀座的典型结构,它由上阀盖(或高温上阀盖)、阀体、下阀盖、阀芯与阀杆组成的阀芯部件、阀座、填料、压板等组成。
直通单阀座的阀体内只有一个阀芯和一个阀座,其特点是结构简单、泄漏量小(甚至可以完全切断)和允许压差小。因此,它适用于要求泄漏量小,工作压差较小的干净介质的场合。在应用中应特别注意其允许压差,防止阀门关不死。
直通双座调节阀的阀体内有两个阀芯和阀座。它与同口径的单座阀相比,流通能力约大20%~25%。因为流体对上、下两阀芯上的作用力可以相互抵消,但上、下两阀芯不易同时关闭,因此双座阀具有允许压差大、泄漏量较大的特点。
故适用于阀两端压差较大,泄漏量要求不高的干净介质场合,不适用于高粘度和含纤维的场合。
常见故障及解决方法
1. 执行器不动作,但控制模块电源和信号灯均亮
处理方法:检查电源电压是否正确;电动机是否断线;十芯插头从端到各线终端是否断线;电动机、电位器、电容各接插头是否良好;用对比互换法判断控制模块是否良好。
2. 执行器不动作, 电源灯亮而信号灯不亮
处理方法:检查输入信号极性等是否正确;用对比互换法判断控制模块是否良好。
3. 调节系统参数整定不当导致执行器频繁振荡
处理方法:调节器的参数整定不合适,会引起系统产生不同程度的振荡。对于单回路调节系统,比例带过小,积分时间过短,微分时间和微分增益过大都可能产生系统振荡。可以通过系统整定的方法,合理的选择这些参数,使回路保持稳定速度。
4. 执行器电机发热迅速、震荡爬行、短时间内停止动作
处理方法:用交流2V 电压档测控制模块输入端是否交流干扰动;检查信号线是否和电源线隔离;电位器及电位器配线是否良好;反馈组件动作是否正常。
5. 执行器动作呈步进、爬行现象、动作缓慢
处理方法:检查操作器传来的信号动作时间是否正确。
6. 执行器位置反馈信号太大或太小
处理方法:检查“零位”和“行程”电位器调整是否正确;更换控制模块判断。
7. 加信号后执行器全开或全关,限位开关也不停
处理方法:检查控制模块的功能选择开关是否在正确位置;“零位”和“行程”电位器调整是否正确;更换控制模块判断。
8. 执行器震荡、鸣叫
处理方法:主要是因为灵敏度调得太高,不灵敏区太小,过于灵敏,致使执行器小回路无法稳定而产生振荡,可逆时针微调灵敏度电位器降低灵敏度;流体压力变化太大,执行机构推力不足;调节阀选择大了、阀常在小开度工作。
9. 执行器动作不正常,但限位开关动作后电机不停止
处理方法:检查限位开关、限位开关配线是否有故障;更换控制模块判断。
10. 执行器皮带断
处理方法:检查执行器内部传动部分是否损坏卡住;“零位”和“行程”电位器调整是否正确;限位开关是否正确。
更多kentintrol阀门商品详情@工博士商城